



آیا تاکنون به این فکر کردهاید که دنیای رباتها تنها به خودشان محدود نیست؟ در حقیقت، رباتها بهسرعت در حال تغییر محیطهای کاری ما هستند و دنیای صنعتی را نیز متحول کردهاند. یکی از شاخههای جالب این فناوری دستکاری رباتیک است که در ظاهر شاید ساده به نظر برسد، اما عملاً تغییرات عظیمی در تولیدات صنعتی، جابهجایی قطعات، و حتی امور پیچیدهتر در محیطهای کاری انسان ایجاد کرده است. این سیستمها نهتنها کارهایی را که انسانها بهسختی میتوانند انجام دهند، بلکه کارهایی را که نیازمند بهدقت و سرعتی بینظیری هست را نیز انجام میدهند. از کجا شروع کنیم و چرا باید به این تکنولوژی توجه کنیم؟ همراه ما باشید تا از صفر تا صد این ربات را بدانید.
فهرست مطالب
دستکاری رباتیک چیست؟
بازوی دستکاری رباتیک یک دستگاه مکانیکی قابلبرنامهریزی و چندمنظوره است که وظیفه جابهجایی مواد، قطعات، اشیا یا ابزارها از طریق حرکات برنامهریزیشده برای انجام کارهای مختلف را دارد. این دستگاههای مکانیکی از یک سری قطعات مفصلی تشکیل شدهاند که بازوی دستکاری شبیه به یک انسان را شکل میدهند. یک بازوی دستکاریکننده رباتیک بسته به تعداد درجات آزادی (axes) که به آن داده شده قادر است اشیا را به طور خودکار حرکت داده یا دستکاری کند. هر محور از دستکاریکننده رباتیک به تعداد موتورهای داخل ربات مرتبط است. دستگاه دستکاری رباتیک میتوانند از دو محور تا دهها محور متفاوت باشند. بیشتر رباتهایی که در محیطهای صنعتی استفاده میشوند، دارای چهارتا شش محور هستند. متداولترین نوع ربات های دستکاری رباتیک معمولاً ربات شش محوره است، زیرا دامنه حرکتی آنها مشابه بازوی انسان است. این ویژگی، انعطافپذیری لازم را برای خودکار کردن بسیاری از فرایندهای صنعتی با رباتها را فراهم میکند.
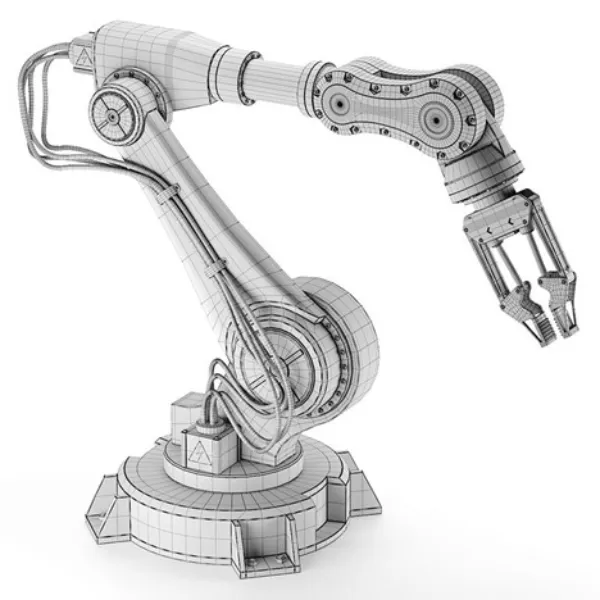
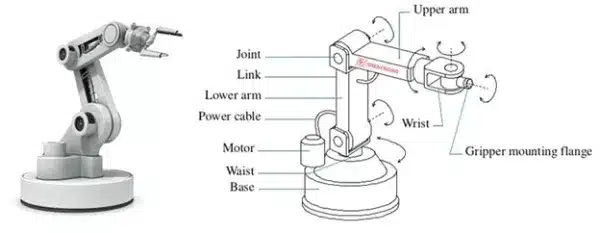
The general construction of a robotic manipulator consists of rigid links that are connected by joints. One end of the manipulator is fixed to a base while the other end is free and used for performing different robotic applications. The structure of the robotic manipulator will determine the reach of its end-effector and its work envelope.
ساختار کلی یک دستکاریکننده رباتیک شامل ارتباطهای سخت است که توسط مفصلها به هم متصل میشوند. قسمت انتهایی یک دستگاه دستکاری رباتیک بر روی یک پایه ثابت میشود، در حالی که انتهای دیگر آزاد است و برای انجام کاربردهای مختلف رباتیک استفاده میشود. ساختار دستکاریکننده رباتیک، دسترسی ابزار انتهایی و محیط کاری آن را تعیین میکند.
منبع: robotsdoneright.com
یکی از مهمترین کاربردهای دستکاری رباتیک در صنعت، جابجایی دقیق و سریع قطعات در خطوط تولید است. رباتهای صنعتی با توانایی بالا در انجام حرکات تکراری و کنترلشده، نقش مهمی در افزایش بهرهوری و کاهش خطاهای انسانی دارند؛ در این میان، ربات جابه جایی یاسکاوا بهعنوان یکی از نمونههای پیشرفته و قابلاعتماد، با دقت حرکتی بالا و طراحی ماژولار، توانسته جایگاه ویژهای در صنایع مختلف از جمله خودروسازی، الکترونیک و بستهبندی به دست آورد.
انواع دستکاری رباتیک
دستکاریکنندههای ربات بهطورکلی به دو بخش تقسیم میشوند، بدن و بازو – مچ. بازو و بدن در دستکاری رباتیک، حرکت اشیا را در محیط کاری ربات کنترل میکنند. برای مثال، هنگامی که FANUC M710ic/50 یک قطعه را به روی یک نوار نقاله منتقل میکند. درحالیکه مچ، حرکت ابزار انتهایی را کنترل میکند و به دستگاه دستکاریرباتیک اجازه میدهد تا وظیفهای را که برای آن برنامهریزی شده است، انجام دهد، مانند FANUC M-20ia که قطعهای را با گیره خود برداشته و جابهجا میکند. نوع و تعداد مفصلهایی که ربات های دستکاری دارند، درجه حرکت، شکل محیط کاری و کاربردهای بالقوه آن را تعیین میکنند. در اینجا به برخی از رایجترین انواع دستکاریکنندههای ربات اشاره میکنیم:
1.دستکاریرباتیک مدل گنتری یا کارتزین
این رباتها به طور رایج نصب میشوند و دارای سه مفصل خطی هستند که حرکات لغزشی خطی را فراهم میکنند. این رباتها بهعنوان ربات سه محوره شناخته میشوند و محیط کاری مستطیلی یا مکعبی بزرگی دارند.

2. دستکاریرباتیک مدل استوانهای
این رباتها به نام شکل محیط کاری خود شناخته میشوند. آنها شامل مفصلهای خطی متصل به یکپایه چرخشی هستند که حرکت در امتداد محور عمودی را تسهیل میکند. باوجود این تنظیم، دستکاری رباتیک در هر جایی از 360 درجه کشیده و باز میشود.
3. دستکاریرباتیک مدل SCARA
این رباتها دارای مفصلهای چرخشی هستند و در امتداد محورهای X/Y حرکت میکنند درحالیکه در محور Z سفت میمانند. نتیجه وجود این ویژگی این است که محیط کاری نیمدایرهای وسیعی ایجاد میشود. دستکاریکنندههای SCARA بهعنوان رباتهای چهارمحوره شناخته میشوند.
4. دستکاریرباتیک مدل ربات قطبی
این رباتها ترکیبی از مفصلهای چرخشی و خطی هستند که به یکپایه متصل شدهاند و اجازه میدهند که حرکات دایرهای در سه محور انجام شود که محیط کاری کروی را فراهم میکند.
5. دستکاریکنندههای ربات مفصلی
این رباتها دارای انعطافپذیرترین پیکربندی در رباتهای صنعتی هستند. بازو در ربات مفصلی از طریق یک مفصل چرخشی به پایه متصل میشود و ارتباطها در داخل بازو از طریق مفصلهای چرخشی به هم متصل میشوند که به بازو امکان چرخش، تابش و انحراف را میدهد. این دستکاریکنندهها بهعنوان رباتهای ششمحوره شناخته میشوند.
کاربرد دستکاری رباتیک
تمام دستکاریکنندههای رباتیک شامل یک کنترلکننده و پنل آموزش (teach pendant) هستند. پنل آموزش برای برنامهریزی دستکاری رباتیک استفاده میشود، درحالیکه کنترلکننده بهعنوان “مغز” ربات عمل میکند و به ربات این امکان را میدهد تا عملیات مورد نظر برنامه را تفسیر کرده و انجام دهد. نحوه عملکرد این ربات بستگی به ظرفیت بار، سرعت و تکرارپذیری آن دارد.
برخی از رایجترین کاربردهای ربات های دستکاری شامل جوشکاری خودکار، مونتاژ رباتیک، حذف مواد، جابهجایی مواد، رنگآمیزی، پالتگذاری رباتیک، جابهجایی و قراردادن خودکار هستند. پیشرفتهای فناوری، دقت و صحت دستکاریکنندههای رباتیک را به طور چشمگیری بهبود بخشیده است و امکان کاربردهای جدید مانند چاپ سهبعدی رباتیک را فراهم کرده است. همانطور که دستکاریکنندهها پیشرفتهتر میشوند، دامنه کاربردهای رباتیک نیز گسترش مییابد. فرایندهای تولیدی با اتوماسیون رباتهای صنعتی کارآمدتر، قابلاعتمادتر و تولیدیتر میشوند.
چرا بازوهای دستکاری رباتیک تیاسگروپ را انتخاب کنیم؟
ما در تی اس گروپ بازوهای دستکاری رباتیک با طراحی سبک، عملکرد خوب و ظرفیت بالای از شرکتهای یاسکاوا به مشتریان خود ارائه میدهیم. بازوهای دستکاری رباتیک که در مجموعه تی اس گروپ وجود دارد در انجام وظایف زیرآبی مانند ساخت، تعمیر و جابهجایی ابزارهای سنگین و وظایف دیگر مفید هستند. اگر قصد خرید دستکاری رباتیک از مجموعه تی اس گروپ دارید میتوانید با شماره زیر تماس بگیرید تا مشاوران این تیم به شما بهترین دستگاه را معرفی کنند.

سخن آخر
دستکاری رباتیک به ما نشان داده است که رباتها نهتنها برای کارهای تکراری یا ساده ساخته نمیشوند، بلکه بهعنوان دستیارهای هوشمند در دنیای صنعت، میتوانند در انجام پیچیدهترین و حساسترین وظایف کمک کنند. انتخاب ربات مناسب باتوجهبه نیازها و محیط کاری، میتواند انقلابی در تولید و بهرهوری باشد. با پیشرفت این تکنولوژی، آیندهای دور از دسترس و پیچیده، به یک واقعیت نزدیک تبدیل میشود. اگر همچنان سؤالی برای شما باقیمانده است که جواب آن را دریافت نکردهاید میتوانید با شمارهگیری شماره تماس درج شده از تیم کارشناسان تیاس گروپ مشاوره رایگان دریافت کنید و سؤالات خود را مطرح کنید.
بدون دیدگاه